Cảm biến siêu âm hc-sr04
TP.HCM: Miễn tổn phí vận chuyển đơn hàng từ 300kTỉnh thành khác: Miễn phí vận chuyển deals từ 500k
Cảm thay đổi siêu âm HC-SR04 (Ultrasonic Sensor) được sử dụng rất phổ biến để khẳng định khoảng phương pháp vì RẺ và CHÍNH XÁC.
Bạn đang xem: Cảm biến siêu âm hc-sr04
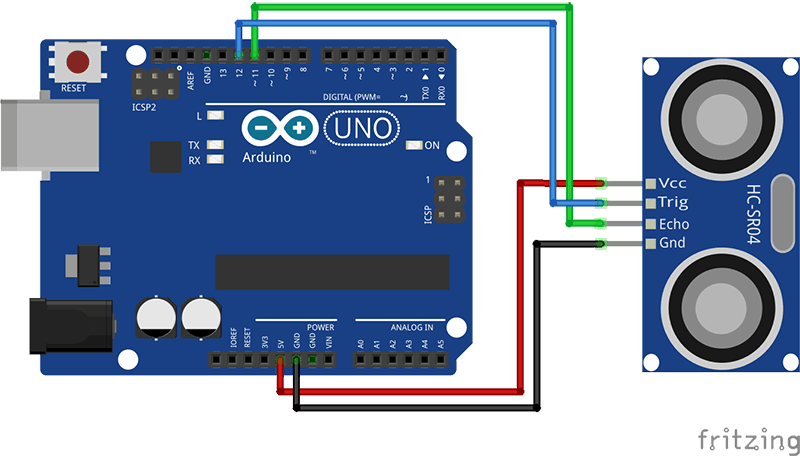
Cảm biến hóa HC-SR04 thực hiện sóng khôn cùng âm và rất có thể đo khoảng cách trong khoảng chừng từ 2 -> 300cm, cùng với độ đúng đắn gần như chỉ phụ thuộc vào phương pháp lập trình.VCC (5V), trig (chân tinh chỉnh phát), echo (chân nhận tín hiệu phản hồi), GND (nối đất)
Cảm biến hóa siêu âm SR04 sử dụng nguyên tắc phản xạ sóng khôn xiết âm. Cảm biến gồm 2 module.1 module phạt ra sóng rất âm và 1 module thu sóng cực kỳ âm sự phản xạ về. Đầu tiên cảm biến sẽ phạt ra 1 sóng khôn cùng âm cùng với tần số 40khz. Nếu bao gồm chướng không tự tin vật trên đường đi, sóng vô cùng âm sẽ phản xạ lại và tác động lên module nhận sóng.
Xem thêm: Nơi Bán Xe Air Blade 2013 Giá Bao Nhiêu, Mua Bán Xe Air Blade 2013 Giá Rẻ
Bằng cách đo thời hạn từ lúc phát cho lúc nhận sóng ta sẽ tính được khoảng cách từ cảm ứng đến chướng ngại vật vật.Khoảng bí quyết = (thời gian * tốc độ âm thanh (340 m/s) / 2
THÔNG SỐ KỸ THUẬT CẢM BIẾN SIÊU ÂM HC-SR04
Điện áp: 5V DCDòng hoạt động: mức cao: 5VMức thấp: 0VGóc tối đa: 15 độKhoảng cách: 2cm – 450cm (4.5m)Độ bao gồm xác: 3mmVIDEO MÔ TẢ
SƠ ĐỒ KẾT NỐI
———————-CODE THAM KHẢO——————-
/* * Kết nối: HCSR04 Arduino VCC 5V GND GND TRIG 8 ECHO 7 hấp thụ code mở Serial Monitor chọn No line ending, baud 9600. */const int trig = 8; // chân trig của HC-SR04const int echo = 7; // chân echo của HC-SR04 void setup() Serial.begin(9600); // giao tiếp Serial cùng với baudrate 9600 pinMode(trig,OUTPUT); // chân trig đang phát biểu hiện pinMode(echo,INPUT); // chân echo đang nhận tín hiệu void loop() unsigned long duration; // biến chuyển đo thời gian int distance; // vươn lên là lưu khoảng cách /* phân phát xung từ bỏ chân trig */ digitalWrite(trig,0); // tắt chân trig delayMicroseconds(2); digitalWrite(trig,1); // phân phát xung trường đoản cú chân trig delayMicroseconds(5); // xung bao gồm độ lâu năm 5 microSeconds digitalWrite(trig,0); // tắt chân trig /* thống kê giám sát thời gian */ // Đo phạm vi xung HIGH nghỉ ngơi chân echo. Duration = pulseIn(echo,HIGH); // Tính khoảng cách đến vật. Distance = int(duration/2/29.412); /* In công dụng ra Serial Monitor */ Serial.print(distance); Serial.println("cm"); delay(200);
HÌNH ẢNH SẢN PHẨM












